He’s known as “The Tunabot Guy” – the University of Virginia postdoctoral researcher who is scaling up the performance of robotic fish. It’s a concept first spawned as part of a UVA research collaboration to test the limits of underwater mobility.
Labs Betting on Vehicles Inspired by Robotic Fish Turn to UVA’s ‘Tunabot Guy’

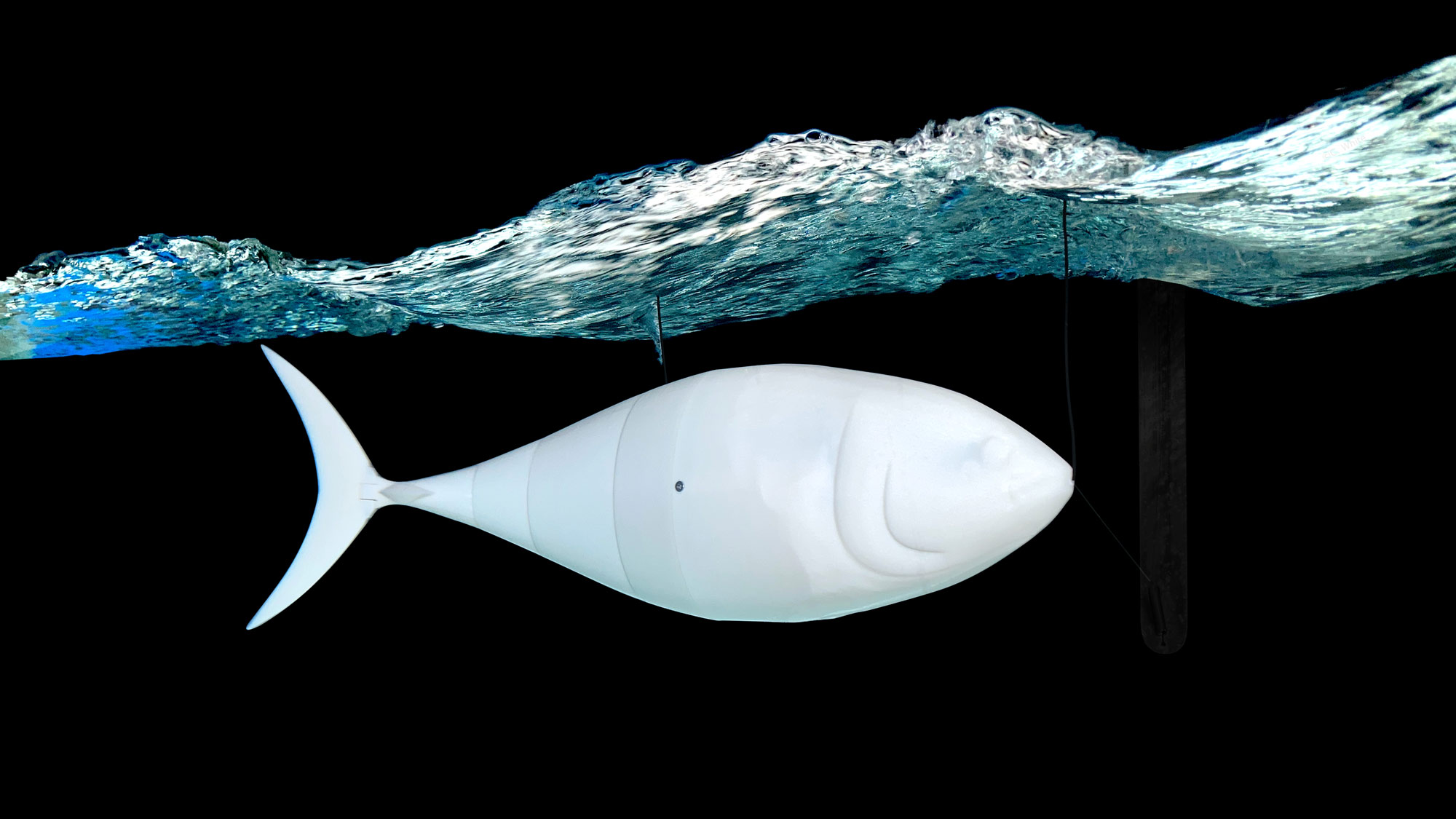
Carl White displays a tunabot, which he is refining for the development of advanced autonomous underwater vehicles. (Contributed photo)
Carl White works in professor Hilary Bart-Smith’s Bio-Inspired Engineering Research Laboratory, dedicating his efforts to the development and testing of the “tunabots” as a postdoctoral fellow. The “double Hoo” earned his bachelor’s and doctorate from the School of Engineering and Applied Science’s Department of Mechanical and Aerospace Engineering.
Drawing inspiration from the exceptional speed and endurance of tuna, White's mission centers on bridging the gap between biology and engineering to develop autonomous underwater vehicles, or AUVs. Whereas AUVs are traditionally propeller-driven tubes, bioinspired vehicles based on fish have bodies with complex, undulatory motions.
“The tunabots are testing platforms that further our understanding of high-performance fish and how we can harness their remarkable capabilities to inform AUV design,” said White, who was a part of Bart-Smith’s team that worked alongside Harvard University researchers to test the original tunabot.

Hilary Bart-Smith, left, and her Bio-Inspired Engineering Research Laboratory host postdoctoral researcher Carl White, right. (School of Engineering and Applied Science and contributed photos)
In 2021, White unveiled the new generation, dubbed “Tunabot Flex.” The robot was not only more flexible, but it was faster and more than twice as efficient in its movements as its similarly sized predecessor. This unprecedented combination led to funding from the Office of Naval Research. Boston Engineering, a research and development firm, is now further developing the technology.
“Tunabot Flex’s remarkable agility, efficient propulsion and ability to navigate complex underwater environments hold great promise for advancements in underwater exploration, environmental monitoring and underwater robotics,” Bart-Smith said. “It serves as a testament to the boundless potential of bioinspired engineering and paves the way for exciting possibilities in underwater robotics research and applications.”
White designed the new iteration using high-speed video, photographs and a 3-D model of tuna provided by biologists at Harvard’s Lauder Laboratory. He also traveled to the Harvard lab for experiments. Despite the lab having a custom-flow tank capable of high-speed conditions, Tunabot Flex cruised at the tank’s upper limit with a voltage input of just 60%.
This meant that the robot could have flapped much faster, generating even higher speeds, but was untestable due to the flow tank’s limits. Nevertheless, the tested speeds and corresponding energy efficiencies of the robot were already exceptional.
“The fact that Tunabot Flex maxed out our tank signifies a leap forward in our understanding of aquatic locomotion,” Harvard professor George Lauder said.
A Tunabot Flex swims in the University of Virginia’s flow tank. (Contributed photo)
White, too, saw the significance of those tests.
“There is a crucial tradeoff between speed and energy efficiency for bioinspired AUVs,” White said. “Robotic fish are currently unable to match the combined swimming speed and efficiency of high-performance fish. If this gap were to close, the potential for AUVs would be significant. One day, AUVs may even outperform fish.”
While continuing his fruitful partnership with Lauder and the Lauder Laboratory, White also collaborated with postdoctoral fellow Robin Thandiackal to investigate the intricacies of linear acceleration from rest using Tunabot Flex.
“Understanding the mechanisms and dynamics involved in accelerating from a stationary position is crucial in various fields, including robotics, biomechanics and vehicle engineering,” Thandiackal said. “The research sheds light on the intricate interactions between body and fluid, and how thrust forces are generated during the process of linear acceleration, offering a deeper understanding of how organisms and engineered systems achieve efficient and rapid movement.”


This year, White has lent his expertise to Princeton University professor Radhika Nagpal’s new lab, assisting it in adapting the proven design of Tunabot Flex for its own robotic fish, which will swim in groups like schools of fish.
“I see ecology as a model for robotics,” Nagpal said. “I envision robot teams that seamlessly blend into their environment, minimizing waste and disruption to ecosystems, just like nature.”
White added: “Schooling behavior offers a collective efficiency boost. A group of robotic fish could coordinate to quickly complete a task, such as surveying or repairs, and then swim in a school to the next location – all while minimizing ecological disruption.”


